Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
NC State University Develop Shape-Shifting Robot Inspired by Origami

A team of researchers at North Carolina State University has created a plastic cube structure capable of transforming into over 1,000 configurations using just three motors. This breakthrough could lead to the development of versatile robots for various applications, particularly in architecture and space exploration.
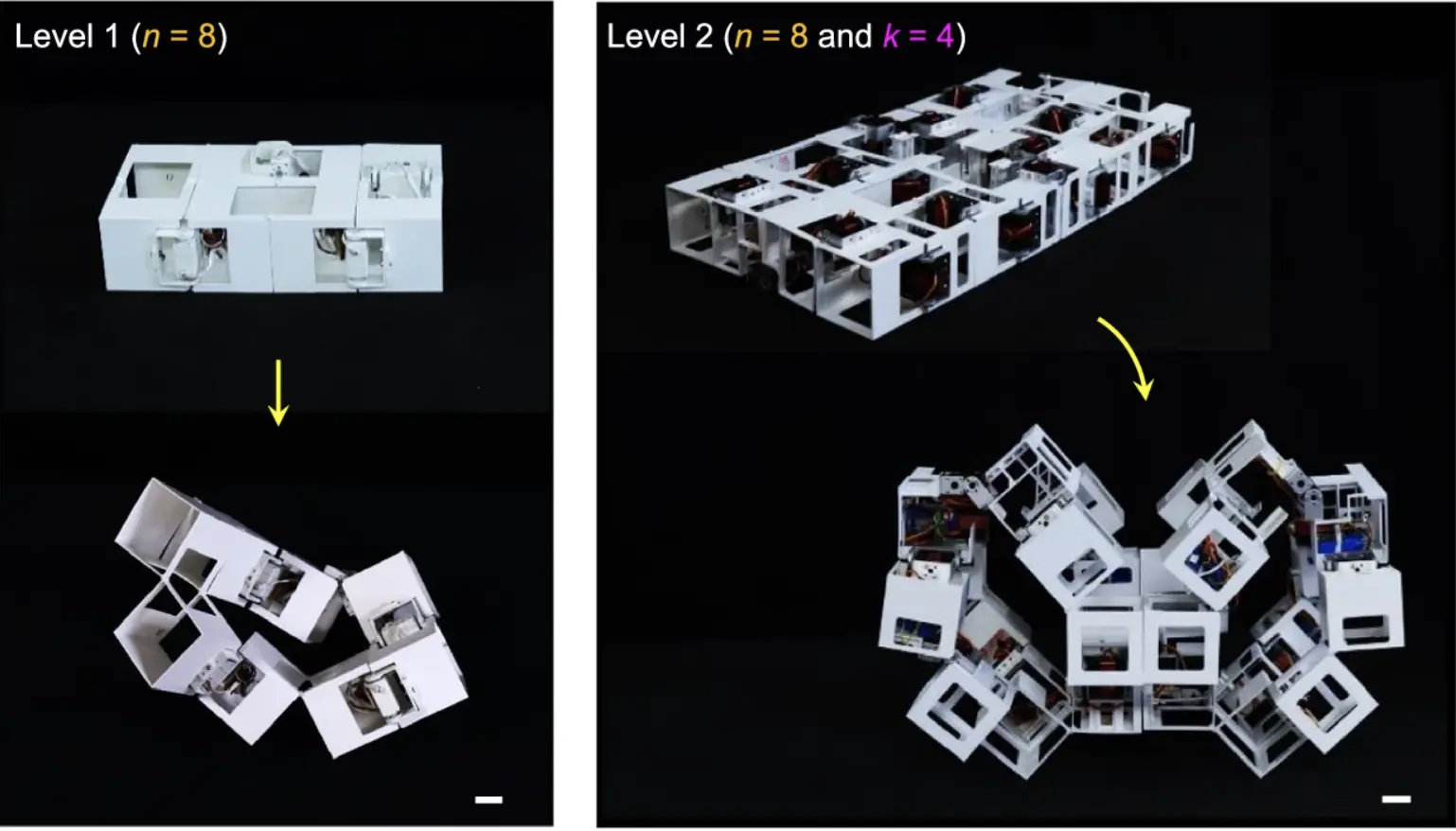
In their research paper, the team explains how they used a 3D printer to assemble 36 hollow plastic cubes connected by rotating hinges. Some hinges were fixed with metal pins, while others were motorized. This configuration allowed the structure to morph into a variety of shapes, including tunnels, bridges, and multi-story structures.
By changing shape, the transformer bots can move in all directions and carry loads up to three times their own weight, all without the need for feet.
The shape-shifting bots can adapt to different tasks and environments, making them potentially useful for multifunctional applications in fields like space exploration. The bots’ ability to carry loads and change shape as needed could revolutionize the design of artificial systems.
“We think these can be used as deployable, configurable space robots and habitats,” said Antonio Di Lallo, a co-first author of the paper. “It’s modular, so you can send it to space flat and assemble it as a shelter or as a habitat and then disassemble it.”
While the technology holds great promise, there are some limitations. The load-bearing capacity of the structures, especially at larger scales, needs improvement. Current prototypes are limited in their ability to handle significant weight due to the materials used for hinges, which sacrifice strength for flexibility. Additionally, the researchers noted challenges in fully leveraging the shape-morphing capabilities for diverse robotic locomotion in unstructured environments.
The research opens new avenues for future exploration. “We want to make a more robust structure that can bear larger loads,” stated Yanbin Li, a co-corresponding author of the paper. “If we want a car shape, for example, how do we design the first structure that can transform into a car shape? We also want to test our structures with real-world applications like space robots.”
The study, published in Nature Communications, was supported by grants from the National Science Foundation. This innovative approach to robotic design could lead to new advancements in artificial systems, making them more adaptable and functional for various applications.

 Latest articles
Latest articles 


Leave a Comment
Cancel